



Especificaciones
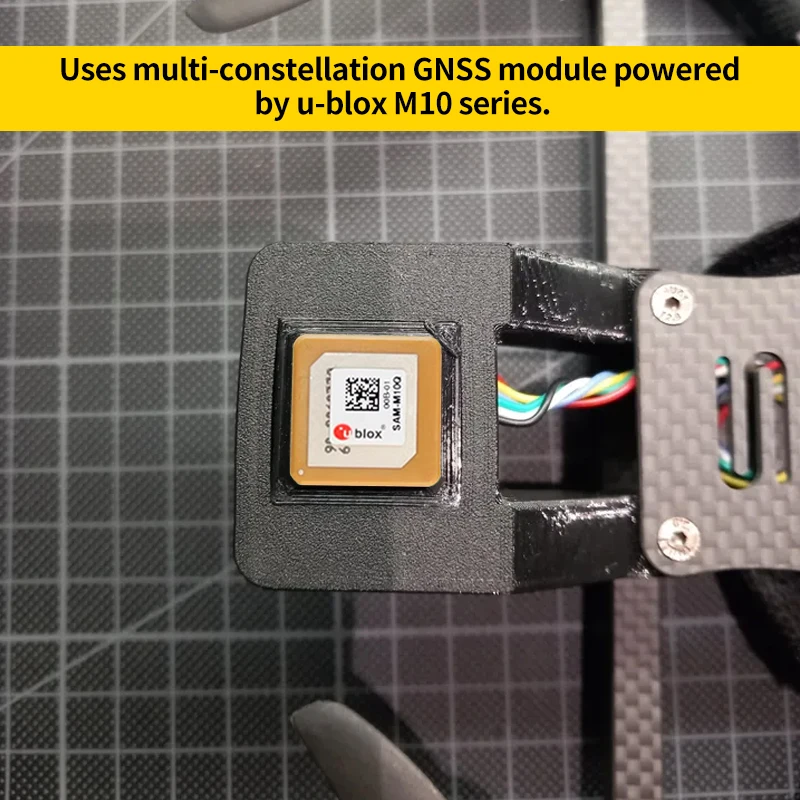
GNSS u-blox SAM-M10Q-00B (GPS, GLONASS, Galileo y BeiDou)
La Brújula magnética QMC5883L
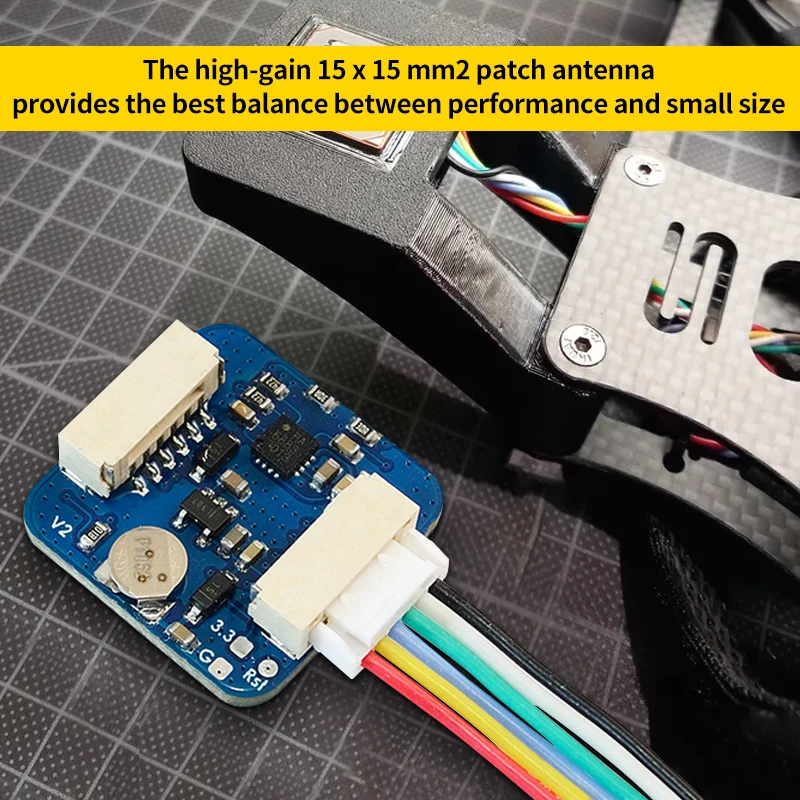
Antena de parche de 15*15*4 mm
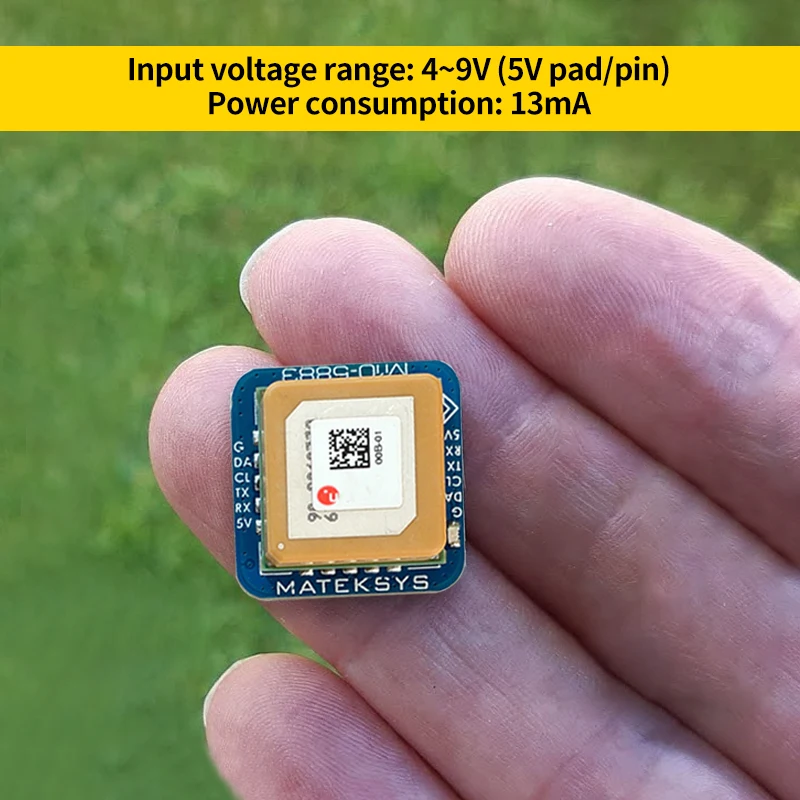
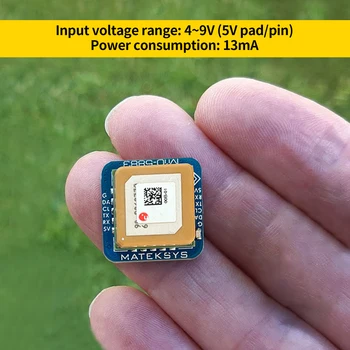
Rango de voltaje de entrada: 4~9V (5V/almohadilla de pin)
Consumo de energía: 13mA
UART velocidad en baudios: 9600 defecto
Temperaturas De Funcionamiento: -20~80 °C
UART(TX, RX) de la interfaz para el GNSS SAM-M10Q-00B
I2C(DA, CL) de la interfaz para Compass QMC5883L
JST-GH-6P conector (SM06B-GHS-TB). 1.27 mm
GNSS PPS LED, Verde. (Sólido después DE encendido, intermitente(1 hz) cuando GNSS conseguir 3D)
Protocolo: UBX(u-blox) 5Hz@GPS+GA+BDS B1C+GLO o NMEA 1Hz
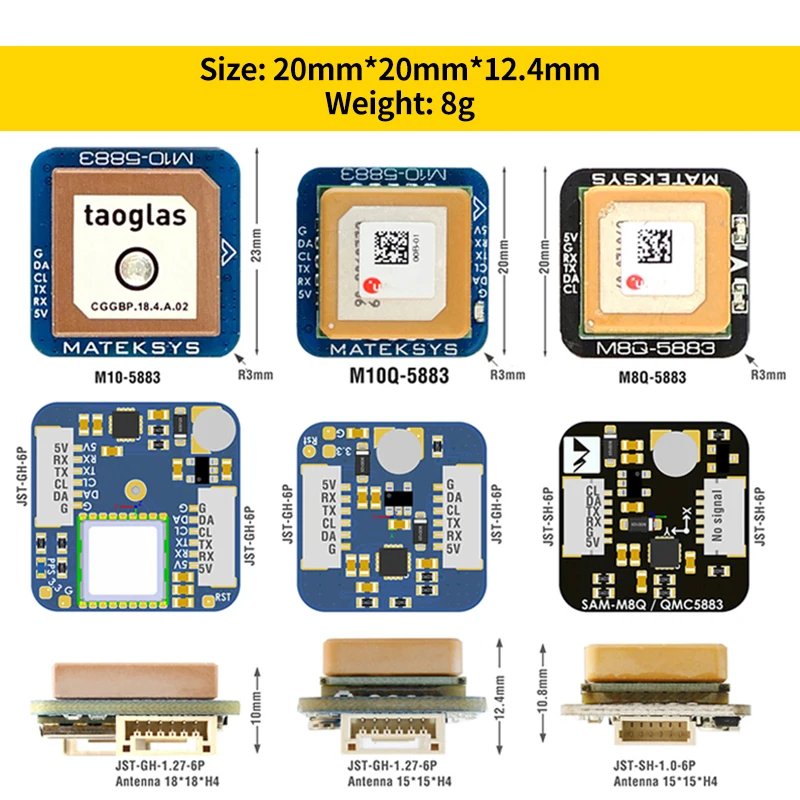
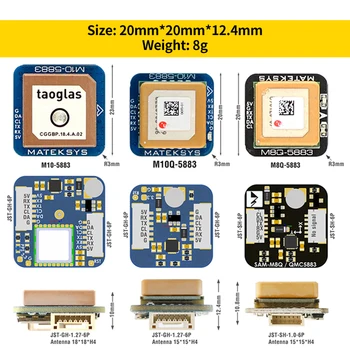
20 mm*20mm*12.4 mm
8g
Incluye
1x M10Q-5883
1x JST-GH-6P a JST-GH-6P 20 cm de alambre de silicio
Descripción
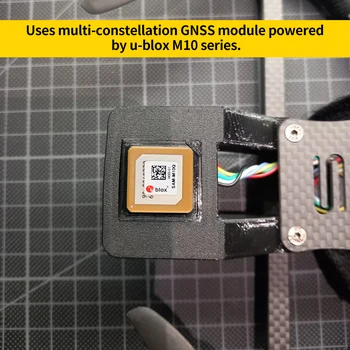
M10Q-5883 utiliza multi-constelación GNSS módulo alimentado por el u-blox SAM-M10Q-00B.
El SAM-M10Q características de la u-blox M10 estándar de precisión GNSS de la plataforma y proporciona una excepcional sensibilidad y el tiempo de adquisición para todas las señales GNSS L1.SAM-M10Q apoya concurrente de recepción de cuatro GNSS (GPS, GLONASS, Galileo y BeiDou).El elevado número de satélites visibles permite que el receptor para seleccionar la mejor de las señales.Esto maximiza la posición de la disponibilidad, en particular en condiciones difíciles, tales como en los profundos cañones urbanos.u-blox Super-S (Super-Señal), la tecnología ofrece una gran sensibilidad RF y puede mejorar la dinámica de la precisión de la posición en la no-línea-de-vista de los escenarios.
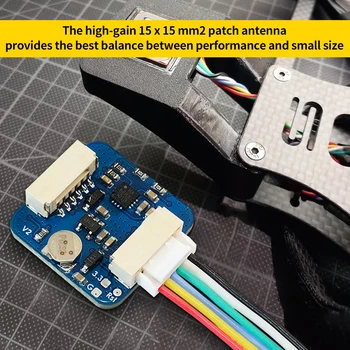
La alta ganancia de 15 x 15 mm2 antena de parche proporciona el mejor equilibrio entre rendimiento y reducido tamaño.La antena omnidireccional patrón de radiación aumenta la flexibilidad para la instalación del dispositivo.
Más detalles acerca de la SAM-M10Q, pls check out u-blox SAM-M10Q página
El cableado y la configuración de
M10Q-5883 5V para el controlador de Vuelo 4~9V
M10Q-5883 RX para el controlador de Vuelo UART_TX
M10Q-5883 TX para el controlador de Vuelo UART_RX
M10Q-5883 CL controlador de Vuelo I2C_SCL
M10Q-5883 DA a un controlador de Vuelo I2C_SDA
M10Q-5883 G para el controlador de Vuelo GND
Consejos y Notas
Brújula de Alineación(plano de montaje): la Inclinación del magnetómetro se desaconseja !
INAV/BetaFLight: brújula Flecha hacia adelante, conjunto de CW 270° Flip cuando el controlador de vuelo de la flecha es hacia adelante.
INAV/BetaFLight: la brújula de la Flecha hacia atrás, ajuste en sentido horario 90° Flip cuando el controlador de vuelo de la flecha es hacia adelante.
Ardupilot/Misión Planner: Rotación De Ninguno.
Asegúrese de tener brújula/magnetómetro de 10 cm de distancia de las líneas eléctricas/ESC/motores/a base de hierro material
-------
INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 o posterior es necesario.
UBlox NEO-M9N, MAX-M10S, SAM-M10Q serie de todos no tiene memoria integrada.una vez GNSS está apagado y el supercapacitor agotado.la configuración predeterminada.
UBX protocolo es bidireccional.El controlador de vuelo de firmware puede cambiar la configuración del GPS a través de UBX protocolo.Usted no necesita ajustar los GNSS parámetros del módulo en u-center.
La configuración predeterminada en SAM-M10Q con ublox FW 5.1 es concurrente recepción de GPS, Galileo, GLONASS y BeiDou B1C con QZSS y SBAS habilitado.
Empezar con u-blox GNSS FW3.01, timepulse está alineado con la hora UTC y que el tiempo que se establece válida sólo después del segundo salto es descargado.Que podría tomar hasta 12.5 min.Probablemente PPS LED dejará de parpadear inmediatamente después de GPS 3D fijo.
El M10Q-5883 proporciona la capacidad para restablecer el receptor.Puente de la "PRIMERA" de la almohadilla a la Tierra por lo menos 100 ms va a desencadenar un arranque en frío.RESET borrará toda la información y el gatillo de un arranque en frío.Sólo debe ser utilizado como una opción de recuperación.Si está seguro de que el cableado y la instalación de todos los derechos.pero el controlador de vuelo no puede detectar el módulo GNSS(gris icono de GPS), trate de hacer reset.
Los arañazos en la cerámica de la antena son el resultado de la sintonización de la antena.
Solucionar problemas de GPS cuestiones relacionadas con: http://www.mateksys.com/?p=5712#tab-id-6
u-center de Windows
*** El SKU de la impresión de seda en el primer lote de M10Q-5883 PCB es "M10-5883".


si su dirección incluye el siguiente código postal, por favor no elija el español de almacén. el código postal comienza con 51/52/07/35/38/28. almacén extranjero no puede ser entregado. los niños neopreno, chaleco salvavidas ajustable impreso chaleco salvavidas transpiración cierre de cremallera unisex para la práctica del kayak canotaje nadar a la deriva características: 1.relleno de espuma: los



descripción este es un dispensador de agua de juguete para los niños, que está hecho de materiales, y puede ser utilizado por un largo tiempo.forma en forma de dibujos animados de diseño, este dispensador de agua de juguete es encantadora y atractiva para los niños.se puede rellenar con agua pura o sin escoria jugo como un verdadero dispensador de agua. características color: rosa, verde. - material: de plástico. -

4pcs de acero del eje de transmisión ecv eje de accionamiento y de la unidad de la copa de traxxas e-revo 2.0 vxl 86086-4 1/10 coche rc piezas de mejora 100% a estrenar hecho de alta calidad de los materiales, más fuerte y más durable, mejorar la apariencia fácil de usar,fácil de reemplazar material:acero adecuado para:traxxas e-revo 2.0 vxl brushless 86086-4 1/10 rc coche color:plata/negro contenido

características: nuevo y de alta calidad material: felpa suave y algodón de los pp tamaño: como muestra la imagen paquete: 1 pieza en una bolsa de opp. aviso: 1.no dude en ponerse en contacto con nosotros si usted tiene cualquier pregunta. 2. debido a la luz de la pantalla y de la diferencia, el color puede ser ligeramente diferente de las imágenes. 3. por favor permita de 0,5-2 cm de

kawaii de hello kitty de peluche llavero dulce mochila colgante clave de la hebilla de hello kitty cosas accesorios sanrio llavero de peluche de la felpa

información del producto: nombre: escritorio de descompresión de rotación esférica giroscopio material: aluminio color: amarillo / oro / plata / marrón función: rotación de la descompresión, escritorio, decoración tamaño del producto: diámetro: aproximadamente 4cm/1.57 pulg (debido a la medición manual, favor de permitir que un pequeño error) embalaje: bolsa de tamaño del embalaje:

wltoys 124017 1/12 coche rc piezas de repuesto originales 144001-1278 suspensión trasera de eje de piezas de repuesto

smw250128 solenoide de la válvula de cartucho de la gran muralla haval h3 h5 4g63

especificación: material: de plástico color: rojo, amarillo, púrpura, azul, verde, naranja, color al azar edad conveniente: por encima de los 3 años de edad accesorios: dental modelo de funcionamiento de la placa dental, pasta dental, jeringa, pinzas, cepillo de dientes, espejo dental, diente de gancho, taladro dental característica: 【9pcs pretender dental kit】fórceps, jeringa, cepillo de

yeahrun de metal de la caja de engranajes engranaje conjunto axial scx10 wrangler 90047 escala de 1/10 rc crawler modelo de coche piezas de mejora características: 100% nuevo y de alta calidad hecho de metal de alta calidad fácil de instalar y más más duradero mejorar el rendimiento de tu coche rc especificaciones: material: metal color: como muestra la imagen peso: 89 g/set traje para: axial scx10 wrangler 90047 escala de 1/10

kawaii sanrio anime fan de sombrero de sol linda hello kitty dibujos animados ventilador portátil de verano fresco sombrero de carga usb originalidad chica regalos

juego de cerebro adorable descomprimir precioso portátil resistente a la caída entrenamiento sensorial de plástico gato garra juego de la máquina llavero de regalo descripción: exquisita mano de obra asegurarse de que está cómodo al tacto y resistente al uso.mientras tanto, realista la forma lo hace atractivo. usted puede ponerlo en bolsos, teléfonos móviles, llaves, bolsas para la decoración porque tiene juego
